時間積分スキーム SPOOK
AGXの時間積分にはSPOOKを採用
構造保存数値解法のうちのシンプレクティック(Symplectic)解法
アルゴリズムによる発散や散逸がおきない
高周期の振動を安定に計算できる [2]
時間積分は1次精度である
可変タイムステップは不可
SPOOKとは
時間積分スキームにはオイラー法やルンゲクッタ法などがあるが、AGXは「SPOOK」 [Lacoursière2007] [Lacoursière2011] [Sundling2016] を採用している。 SPOOKは離散力学(Discrete Mechanics)に基づいたシンプレクティック(Symplectic)解法である。 保存系において、エネルギーが一定の範囲に保たれ、アルゴリズムによる発散や散逸がおきない。 また、高周期の振動を安定に計算できる特徴がある。
マルチボディダイナミクスの運動は運動方程式(微分方程式)と拘束条件式(代数方程式)を連立した微分代数方程式(DAE、Differential Algebraic Equations)として表される。 例えば、運動方程式とホロノミック拘束は次のようになる [3] 。
ここで、
\(\bm{q}\) : 一般化座標 |
\(\dot{\bm{q}}\) : 一般化速度 |
\(\ddot{\bm{q}}\) : 一般化加速度 |
\(g(\bm{q})\) : ホロノミック拘束条件関数 |
\(\bm{G}=\frac{\partial g}{\partial q}\) : ヤコビ行列 [1] |
\(\bm{f}\) : 外力ベクトル |
\(\bm{\lambda}\) : ラグランジュ定数ベクトル |
\(\epsilon\) : コンプライアンス |
\(\tau\) : スプークダンパ |
である。式(1) をSPOOKの形式で時間離散化すると、
速度の更新
位置の更新
となる。ただし、
\(k\) : 計算ステップ数 |
\(\bm{\Sigma} = \frac{4}{h^2}\rm{diag}[\frac{\epsilon_i}{1 + 4 \tau_i / h}]\) |
\(\bm{\gamma} = \rm{diag}[\frac{1}{1 + 4 \tau_i / h}]\) |
\(\bm{v}\) : 速度 |
\(\bm{x}\) : 位置 |
\(h\) : タイムステップ |
である。 AGXは 式(2) について、ソルバで \(\bm{v_{k+1}}\) と \(\bm{\lambda_{k+1}}\) を求め、 式(3) で位置の更新をする。
精度は1次精度
数値解と真解との差は \(O(h)\) であり、はタイムステップの大きさに比例する。 拘束条件がない場合、速度と位置の更新はSemi implicitオイラースキームと同じになる。
可変タイムステップは不可
固定タイムステップで構造保存が成立するスキームとなっている。
例: 減衰振動
理解を深めるために、重力を無視した減衰振動の運動をSPOOKで記述する。 減衰振動の運動方程式は
\(m\) : 質点の質量 |
\(x\) : 位置 |
\(v\) : 速度 |
\(k\) : ばね係数(弾性係数) |
\(c\) : 減衰係数 |
として、
である。ここで、\(g(x) = x\) として、質点を0の位置に拘束すると、\(G = {\partial g}/{\partial x} = 1\) となることから、 式(1) のDAEの形式で記述すると、
となる。拘束条件 式(6) (b)を変形し、式(1) との対応を取ると、
となり、コンプライアンス、スプークダンパ、ばね係数、減衰係数の関係が得られる。
式(6) をSPOOKのスキームで離散化すると、速度の更新は
となる。ただし、\(\gamma = \frac{1}{1+4 \tau / h}\) 。 これは2変数2本の連立方程式なので、\(v_{k+1}\) と \(\lambda_{k+1}\) について解ける ( 導出 )。
上式の \(v_{k+1}\) を 式(3) に代入し、位置の更新をする。
単振動シミュレーションによるSPOOKの安定性の確認
確認内容と条件
単振動 \(m \dot{v} = -kx\) を対象に次のスキームでシミュレーションし、SPOOKの安定性の確認をした。
Analytical: 解析解
SPOOK
Explicit Euler: 前進オイラー
Implicit Euler: 後退オイラー
Semi Implicit Euler: シンプレクティックオイラー
初期条件とタイムステップを次に示す。
\(m\) |
1kg |
\(x_0\) |
1m |
\(v_0\) |
0m/s |
\(h\) |
0.0167s |
単振動 \(k = 100 \rm{\,N/m}\)
条件を \(k = 100 \rm{\,N/m}\) とした結果を 図 2 と 図 3 、 図 4 に示す。
図 2 より前進オイラーは時間の進行とともに振幅が大きくなり、発散し、「不安定」である。 したがって、保存系のシミュレーションの使用には不適である。
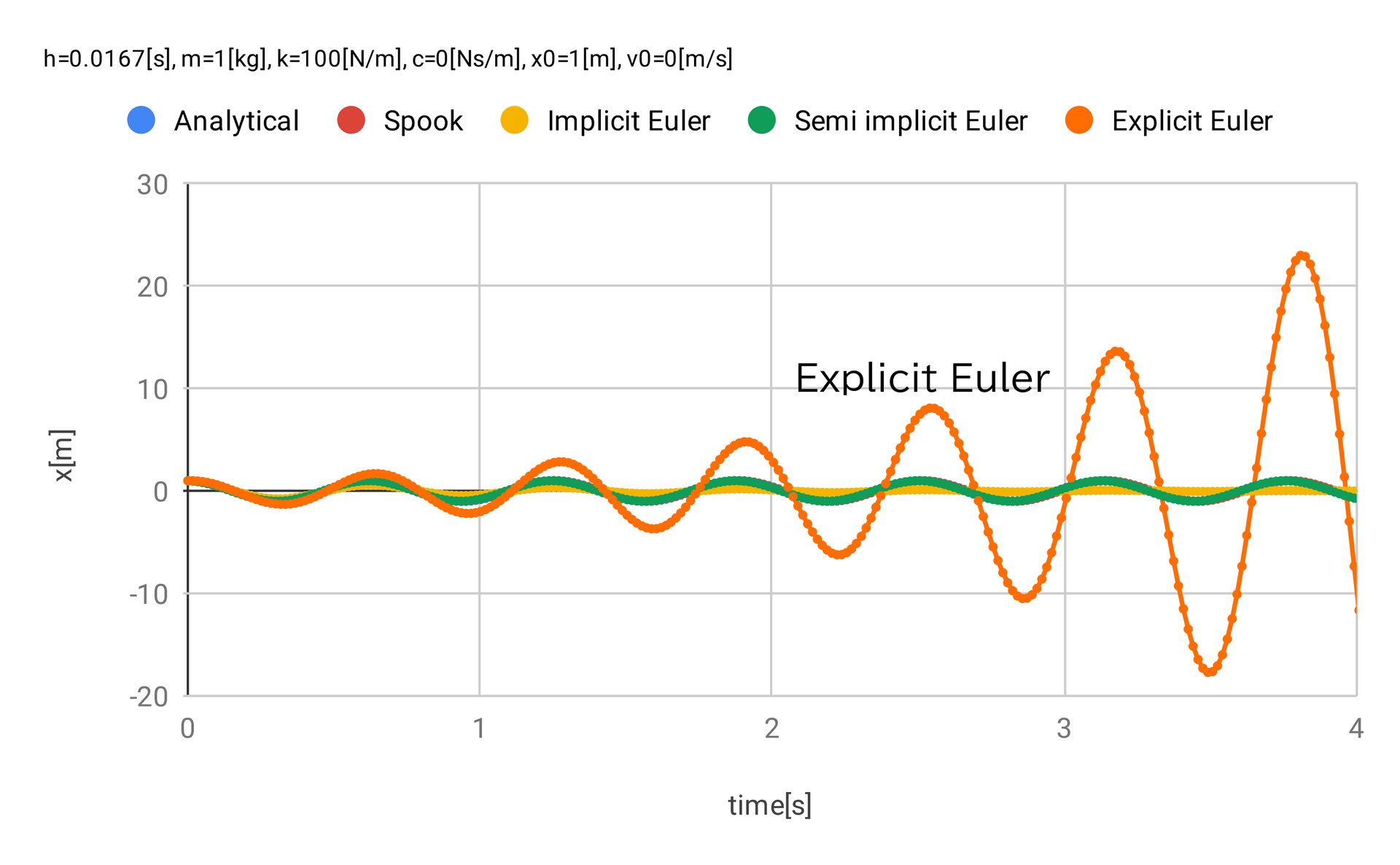
図 2 単振動 \(k = 100 \rm{\,N/m}\)
図 3 は 図 2 のExplicit Eulerを除外し、振幅1mの範囲で拡大したものである。 後退オイラーは時間の進行とともに減衰し、収束していることから「漸近安定」である。 後退オイラーも振動の波形の再現ができておらず、保存系のシミュレーションの使用には不適である。 SPOOKとシンプレクティックオイラーは発散も収束もせず、解析解に追従している。
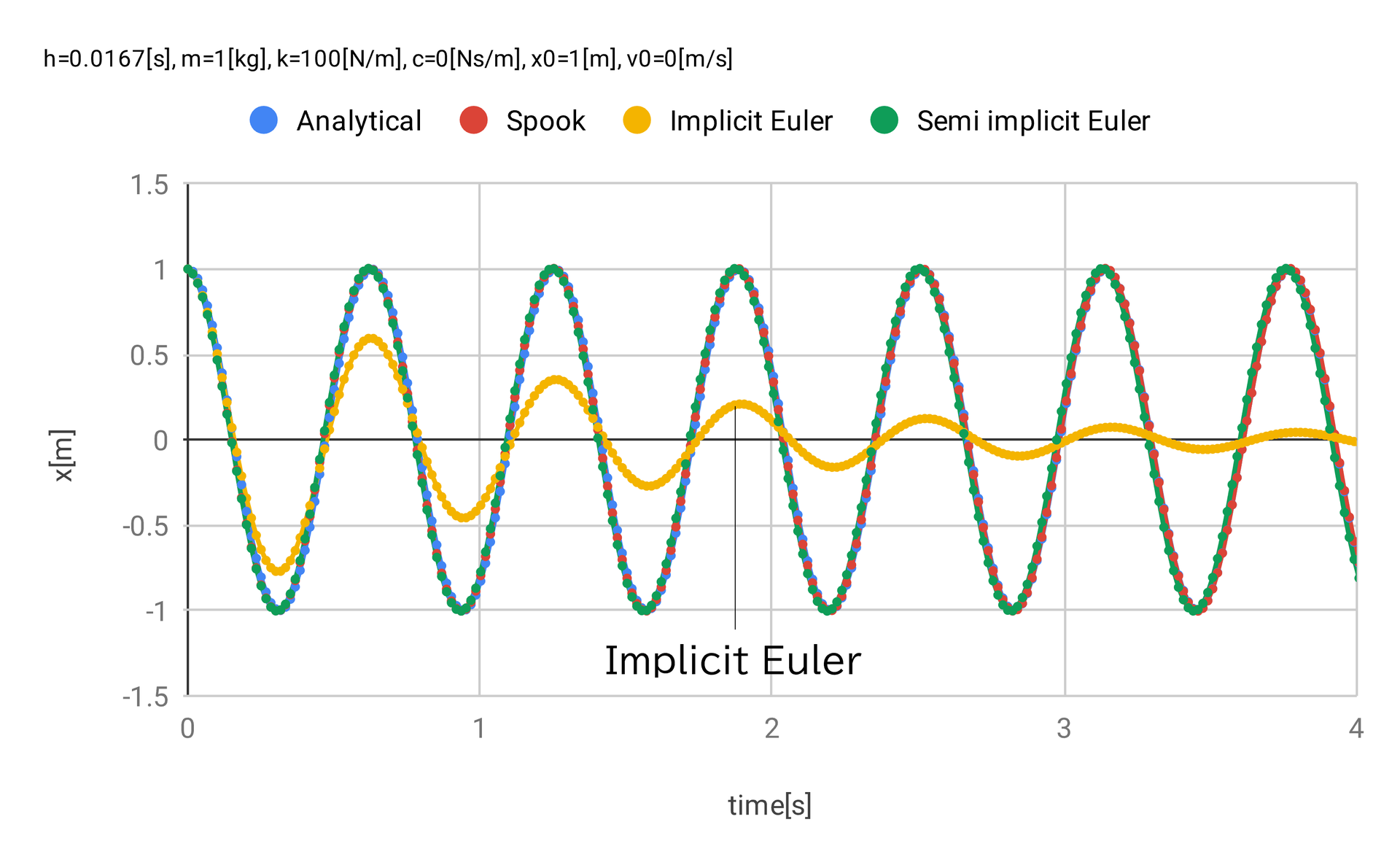
図 3 単振動 \(k = 100 \rm{\,N/m}\) 拡大版
系のエネルギー( 図 4 )について確認すると、 SPOOKとシンプレクティックオイラーは一定の範囲でゆらいで(振動して)いて、エネルギーを厳密に保存していない。
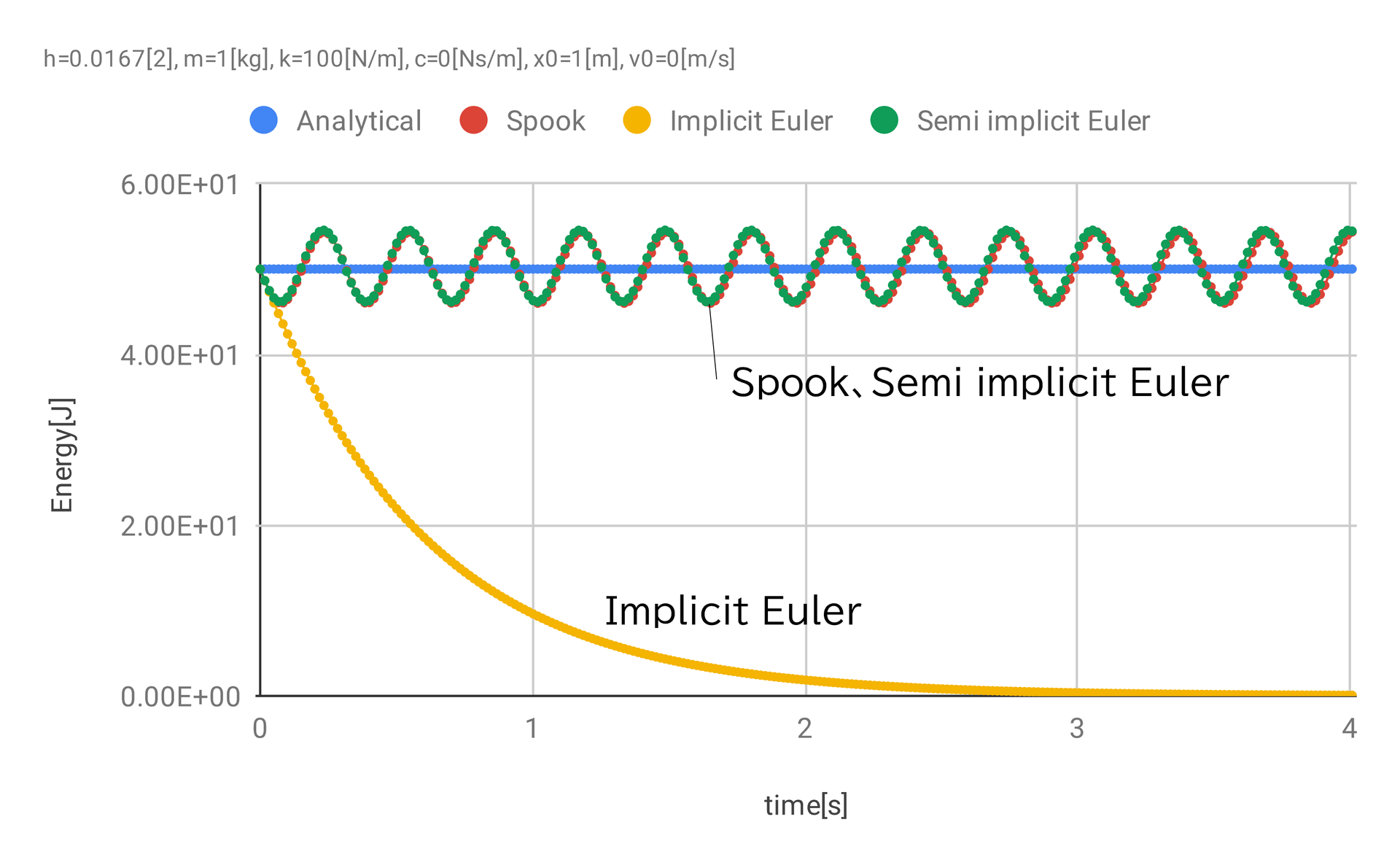
図 4 単振動 \(k = 100 \rm{\,N/m}\) のエネルギー
単振動 \(k = 4m/h^2\) : シンプレクティックオイラーの安定限界
シンプレクティックオイラーは「条件付き安定」であり、安定条件は \(k \le 4m/h^2\) である。 これを基準に \(k = 4m/h^2 \pm 1 \approx 1.434e4 \pm 1 \rm{\,N/m}\) として、シミュレーションをした。 結果を 図 5 と 図 6 、 図 7 に示す。
図 5 は \(k\) の値をシンプレクティックオイラーの安定条件内とした場合の結果である。 シンプレクティックオイラーは振幅が100mを超え、波形を正しく再現できていない。 しかし、発散も収束もしておらず、「安定」 [2] である。
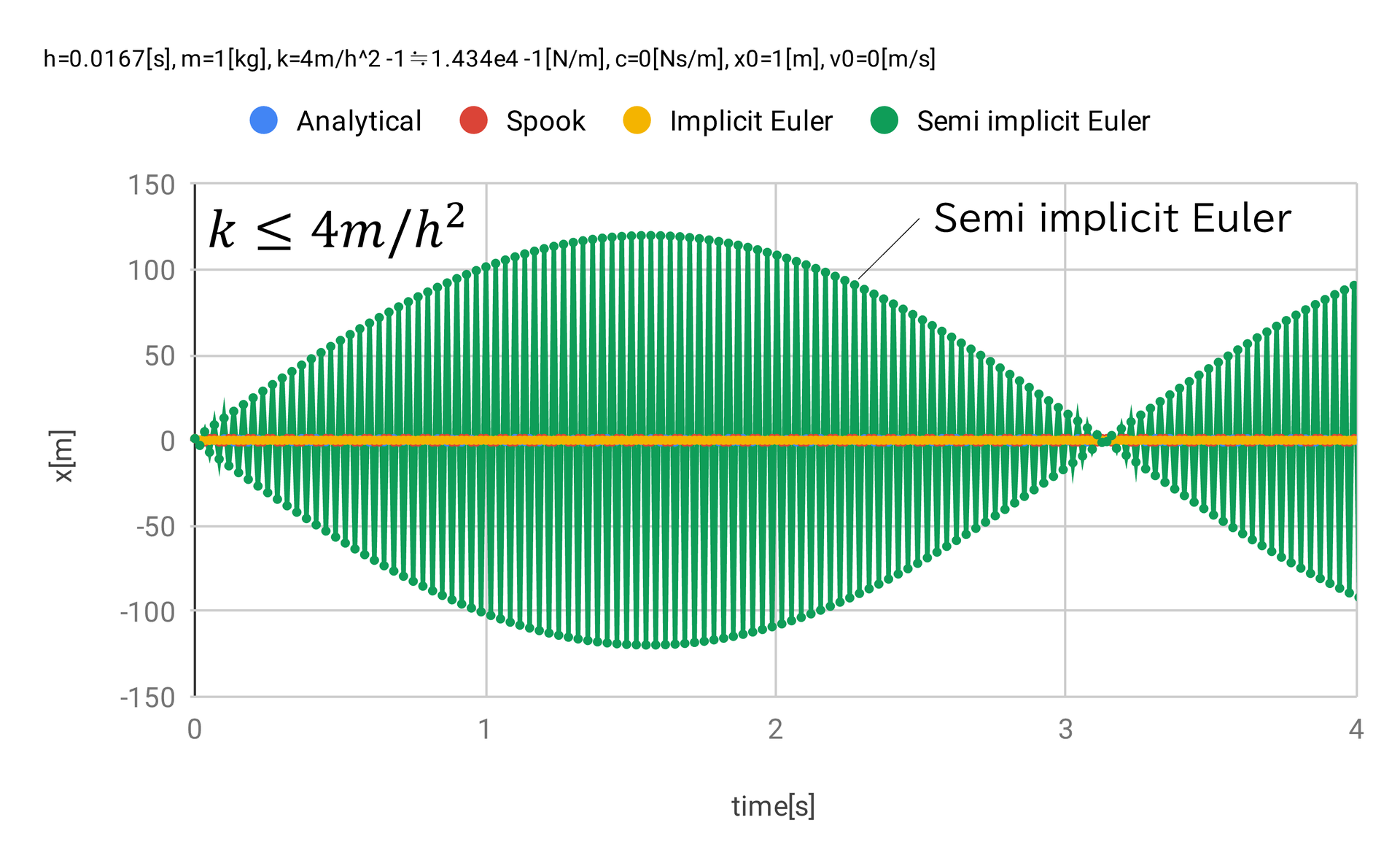
図 5 単振動 \(k = 4m/h^2 - 1\)
図 6 は \(k\) の値をシンプレクティックオイラーの安定条件外とした場合の結果である。 シンプレクティックオイラーの波形は発散しており、「不安定」である。
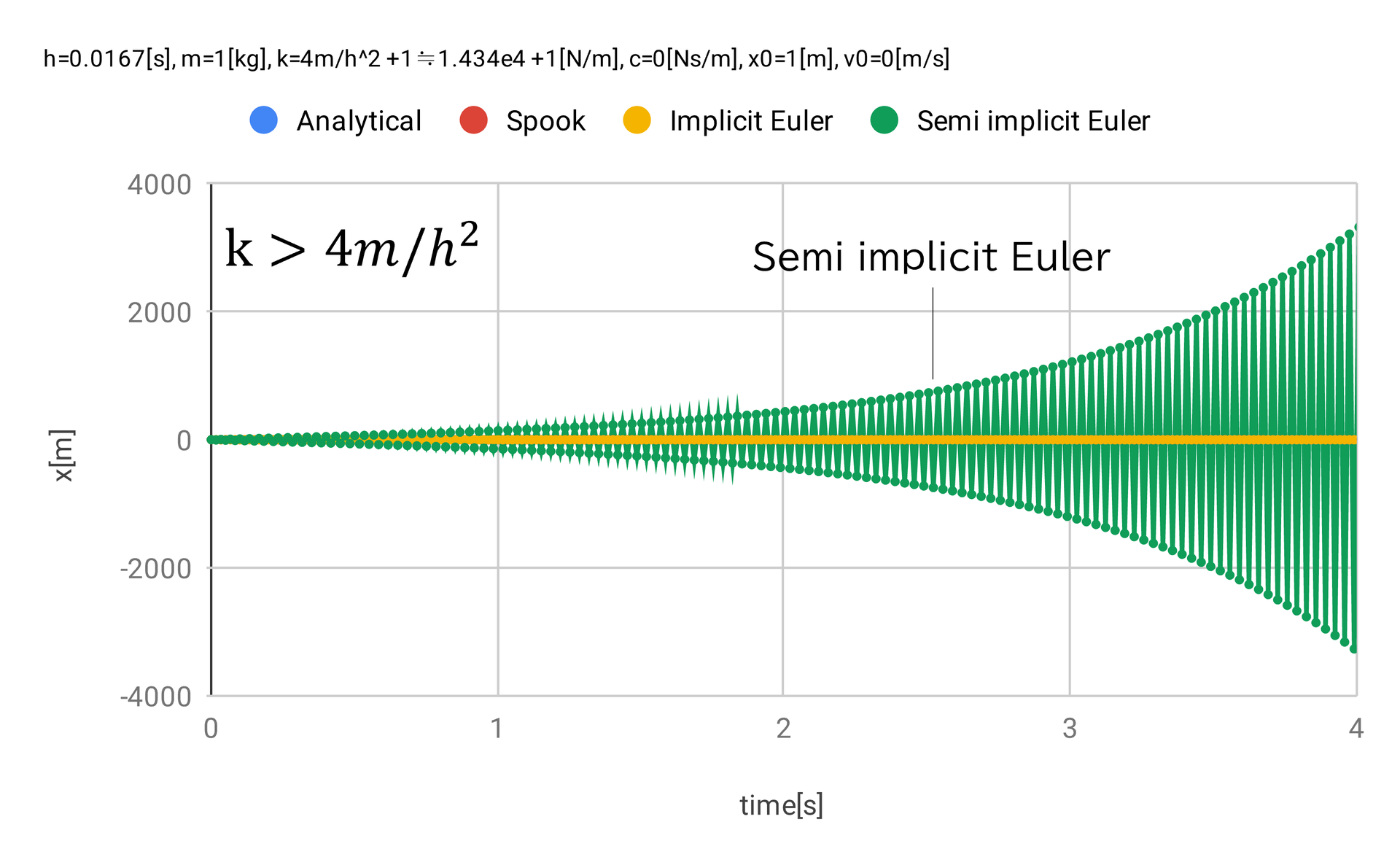
図 6 単振動 \(k = 4m/h^2 + 1\)
図 7 は 図 6 の振幅について-1から1mの範囲で拡大したものである。 タイムステップが大きいため、解析解とSPOOKともに滑らかな波形ではない(タイムステップを小さくすれば滑らかな波形になる)。 また、振動周期の理論値は \(T = 0.0524 \rm{\,s}\) であるが、SPOOKは異なっており、位相がずれている。 SPOOKは発散しておらず、「安定」である。
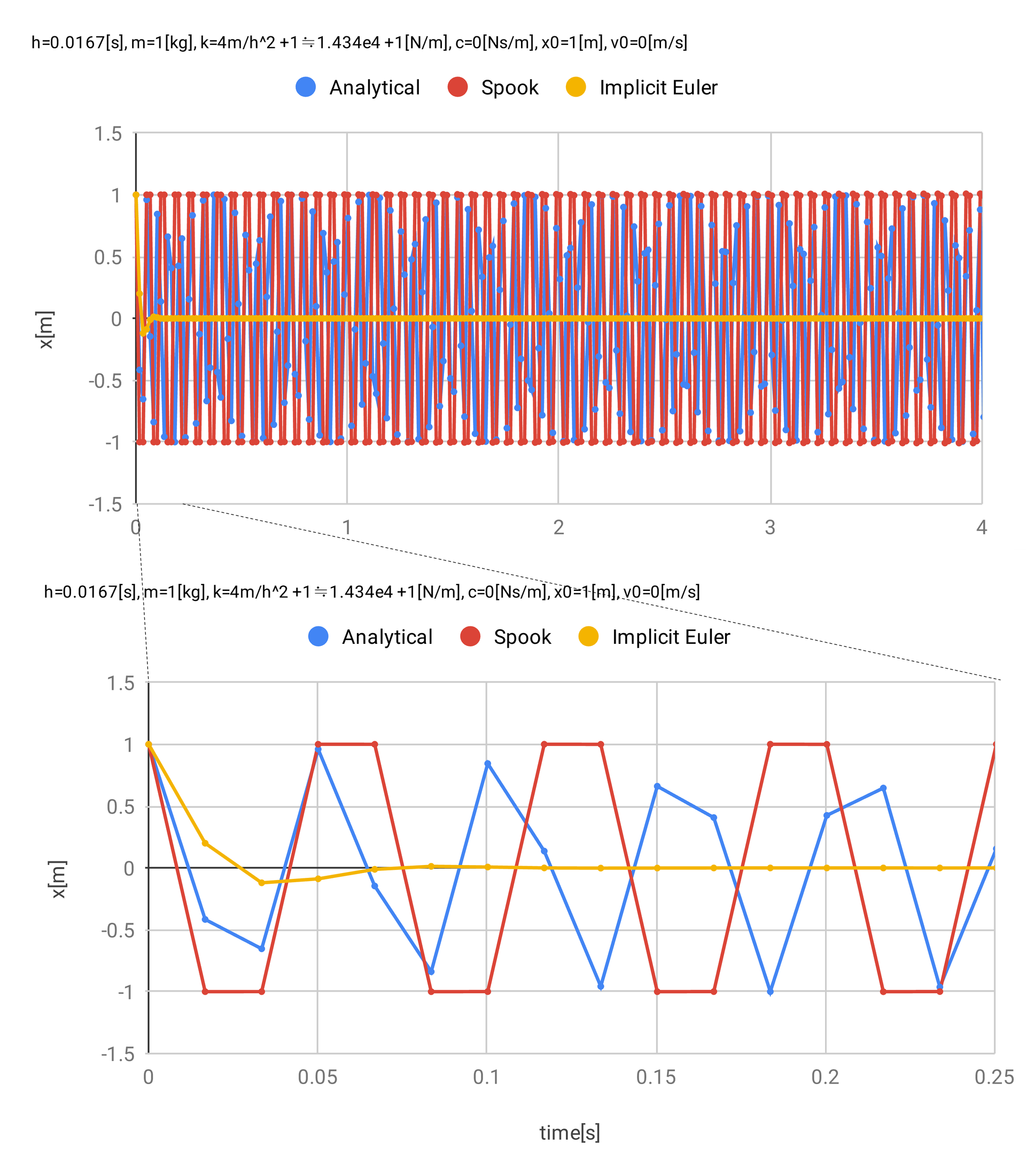
図 7 単振動 \(k = 4m/h^2 - 1\) 拡大版
単振動 \(k = 4m \pi^2/h^2\) 、 \(k=\infty\)
さらに \(k\) を大きくしていき、SPOOKの安定性を探る。 \(k\) を次の値についてシミュレーションした結果を 図 8 と 図 9 示す。
\(k = 4m \pi^2/h^2 \approx 1.42 \times 10^5 \rm{\,N/m}\) |
\(k=\infty \rm{\,N/m}\) |
図 8 の振動周期の理論値は \(T = 0.0167 \rm{\,s}\) で、 タイムステップと同じである。 解析解はサンプリングのタイミングが常に \(\theta = 0 \rm{\,rad}\) の時になるので、直線となる。 振動波形が再現できておらず、「エイリアシング」が発生している。 Spookもサンプリングが不足しており、振幅が大きくなっているが、発散しておらず「安定」である。
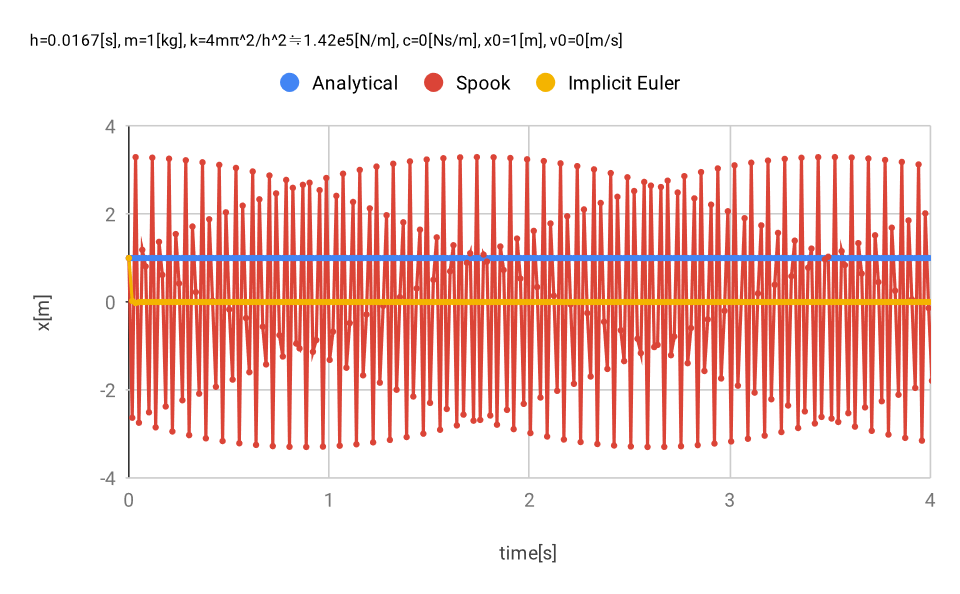
図 8 単振動 \(k = 4m \pi^2/h^2\)
図 9 はSPOOKのみを表示している。 図 8 と同様に波形の再現はできていないが、発散しておらず「安定」である。
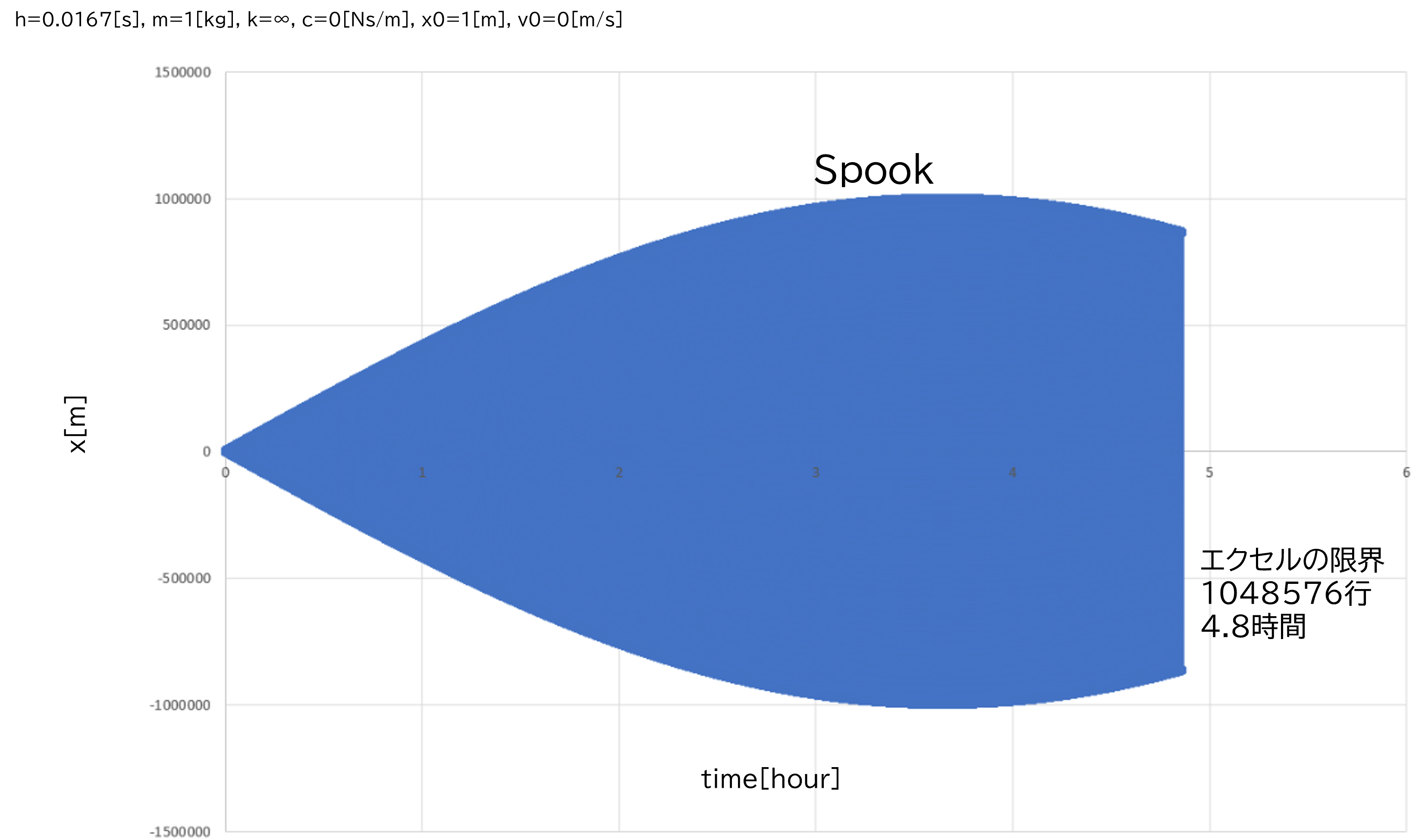
図 9 単振動 \(k=\infty\)
参考文献
Claude Lacoursière. Ghosts and Machines: Regularized Variational Methods for Interactive Simulations of Multibodies with Dry Frictional Contacts. PhD thesis, Department of Computing Science, Umea University, Sweden, SE-901 87, Umea, Sweden, June 2007, URL: https://umu.diva-portal.org/smash/record.jsf?pid=diva2%3A140361&dswid=1753.
Claude Lacoursière and Mattias Linde. Spook: a variational time-stepping scheme for rigid multibody systems subject to dry frictional contacts. Technical report, HPC2N and Department of Computing Science, Umea University, Sweden, 2011, URL: https://webapps.cs.umu.se/uminf/index.cgi?year=2011&number=9.
Emma Sundling. Validation toolbox for a Physics Engine. Master thesis, Physics Department, Umea University, Sweden, 2016, URL: https://umu.diva-portal.org/smash/record.jsf?pid=diva2%3A935814&dswid=8436.
補足
式(9) から 式(10) の導出
式(9) を展開すると、
となる。(a)を \(\lambda_{k+1}=m v_{k+1}-m v_k\) に変形し、(b)に代入し、整理すると \(v_{k+1}\) が得られる。
(a)に \(v_{k+1}\) 代入し、整理すると、\(\lambda_{k+1}\) が得られる。