ライセンス
ライセンスの範囲
ライセンスはAGX、AGXUnity、AGXUnrealとも共通で使用できます。 製品毎にライセンスを手配する必要はありません。
注釈
オープンソースのロボット用統合GUIソフトウェア Choreonoid の AGX Dynamicsプラグイン にも使用できます
Algoryx Momentumはライセンスが異なり、使用できません
ライセンスの単位
ライセンスは計算機の台数毎に必要です。 ライセンスにはモジュールの使用権が設定されています。 モジュールは必須のAGX Coreモジュールと選択式のオプションモジュールがあります。
1ライセンス
AGX Coreモジュール
オプションモジュール
注釈
仮想マシン、クラウドインスタンス、Dockerコンテナなどを使ったスクラップ&ビルド的な使い方を検討されている場合はお問い合わせください。
モジュール
AGX Core(必須) |
基本的なマルチボディダイナミクスの計算機能 |
📖 引張、曲げ、ねじりに対応したケーブルモデル |
|
📖 ケーブルの損傷推定 |
|
📖 強い引張力による高周期振動を抑制する安定なワイヤーモデル |
|
📖 揚力、抗力、付加質量などの流体力学エフェクト |
|
📖 造成可能な土壌モデル |
|
📖 タイヤの弾性や摩擦方向などの特性を考慮したモデル |
|
📖 エンジン、シャフト、ギアなどの要素を結合し、動力を伝達する1Dドライブトレインモデル |
|
📖 NDEM(Nonsmooth Discrete Element Method、個別要素法)による粒状体のシミュレーション |
|
📖 クローラモデル |
|
📖 油圧モデル |
|
📖 Lidar * 、IMU、加速度、ジャイロスコープ、磁気センサ * Lidarの使用にはCUDAが利用可能なKeplerアーキテクチャ以降のNVIDIA GPUが必要 (出典)。 |
|
Inverse Kinematics、Inverse Dynamics、経路追従アルゴリズムPure Pursuitなど機械の制御に関連する機能 |
|
* Windows Pythonのみ。MEX関数を介したMatlab/SimulinkとのCo-Simulation。 |
|
* Windows Pythonのみ。AGXのシミュレーションモデルをFMU(Functional Mockup Unit)にエクスポートしてFMI 2.0に準拠したツールとのCo-Simulation。 |
ライセンスの認証方法
シミュレーションを動作させる計算機またはUSBドングルにライセンスを紐づけ、 AGXを使用するためのライセンス認証をします。 認証には次の方法があります。
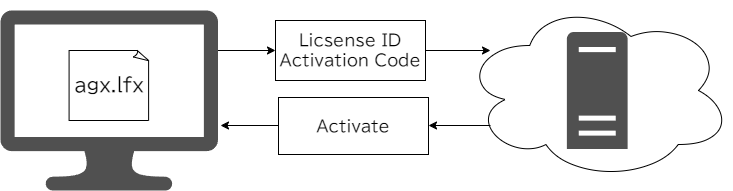
- オンライン認証
使用する計算機からLicense IDとActivation CodeをAlgoryxのサーバーに送信し、ライセンス認証をします。 認証後も定期的にAlgoryxサーバと通信し、ライセンスの状態を更新が必要です。 回数の上限内(10回)で他の計算機にライセンスの移動ができます。 回数の上限に達した場合はVMTにご連絡ください。
- USBドングル認証
使用する計算機にライセンスが付与されたUSBドングル(USBメモリ、ネットワークアダプタ)を接続し、AGXを使用します。 計算機を頻繁に変更する場合はUSBドングル認証がおすすめです。

- 計算機固定認証
使用する計算機(ネットワークアダプタ、NIC)に対してライセンスを付与します。 計算機を変更する場合はVMTにご連絡ください。

ライセンス価格はお問い合わせください
実施される内容に応じて適切な使用形態、モジュールおよび価格を提案いたします。 ライセンス価格は次の項目を考慮しています。
営利目的か非営利(学術研究)目的か
使用する モジュール の種類
使用期間(基本は1年更新のサブスクリプション方式です)
AGX Dynamics、AGXUnity、AGXUnrealの全機能の1ヶ月無料トライアルができます
AGX Dynamics、AGXUnity、AGXUnrealの全機能を使用可能な1ヶ月間のトライアルライセンスを発行いたします。 ご希望の方はお問い合わせください。