agxTerrain miscs
ショベル内の粒子質量を取得する terrain.getDynamicsMass(shovel)
import terrain
terrain.getDynamicsMass(shovel)
図 18 の赤色粒子(InnerBody aggregate)の質量(kg)
ショベル上の粒子質量を取得する
import terrain
terrain.getToolCollection(shovel).getSoilParticleAggregate().getTotalAggregateMass()
図 18 の赤(InnerBody)と青(WedgeBody)色粒子の質量(kg)
すくい上げているときのみ、ショベル上の粒子質量として扱える
ショベルの定義
cutting-direction、cutting-edge、top-edgeの範囲外粒子はカウントされない
Aggregate対象の粒子を可視化する
import agxTerrain
from agxPythonModules.utils.callbacks import StepEventCallback
def setVisualizeAggregatedParticles(terrain: agxTerrain.Terrain, shovel: agxTerrain.Shovel):
def setAggregatedParticlesColor(time: float):
tc: agxTerrain.TerrainToolCollection = terrain.getToolCollection(shovel)
particleAggregate = tc.getSoilParticleAggregate()
for particle in particleAggregate.getInnerBodyParticles(): # type: agx.GranularBodyPtr
particle.setColor(agx.Vec4f(1, 0, 0, 1))
for particle in particleAggregate.getWedgeBodyParticles(): # type: agx.GranularBodyPtr
particle.setColor(agx.Vec4f(0, 0, 1, 1))
StepEventCallback.postCallback(setAggregatedParticlesColor)
setVisualizeAggregatedParticles(terrain, shovel)
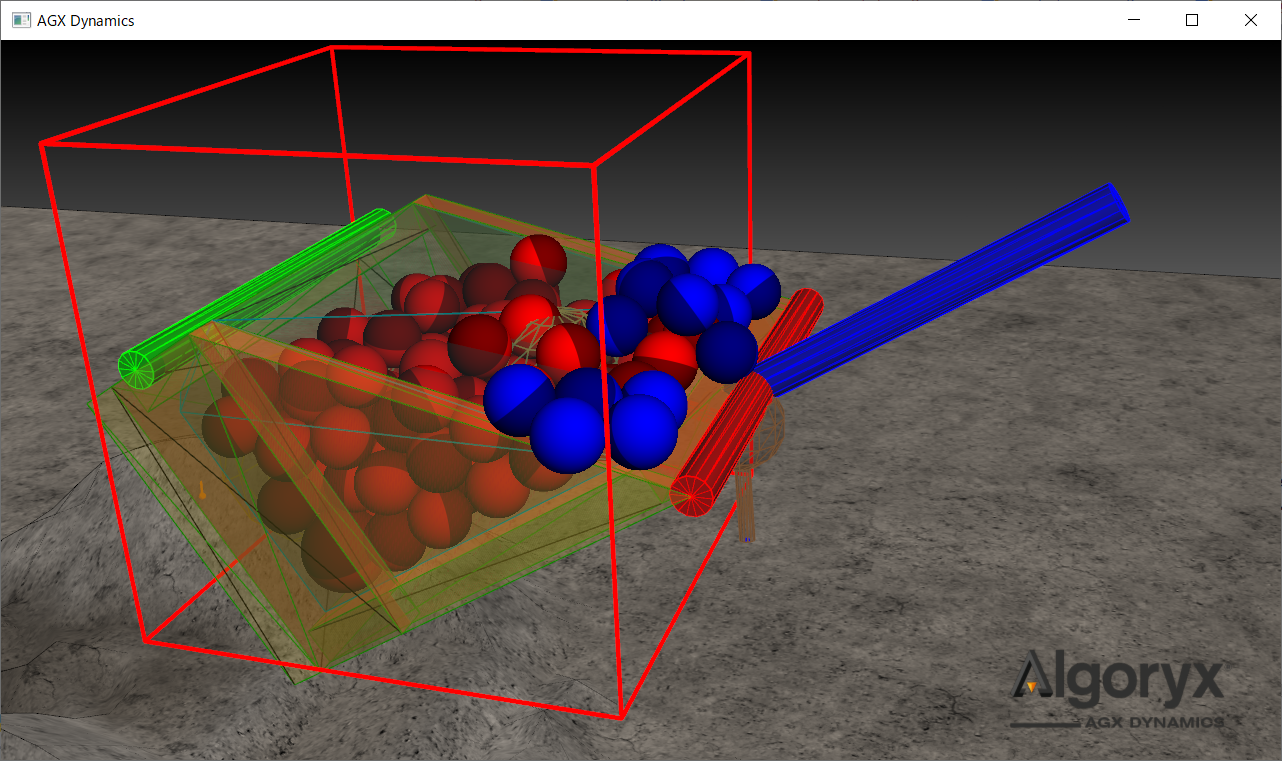
図 18 Aggregate対象の粒子
粒子がショベルを通り抜ける場合の調整
次のとき、粒子がショベルを通り抜けることがある。
ショベルと粒子の相対速度が速い
ショベルの板厚が薄い
粒子サイズが小さい
通り抜ける場合には優先度に応じて次の項目を調整する。
ショベル-粒子間のContactMaterialのDampingを調整し、侵入の解消を早める
particleMat: agx.Material = terrain.getMaterial(agxTerrain.Terrain.MaterialType_PARTICLE) shovelParticleContactMaterial: agx.ContactMaterial = sim.getMaterialManager().getOrCreateContactMaterial(shovelMat, particleMat) shovelParticleContactMaterial.setDamping(2 * timeStep)
タイムステップを小さくし、衝突判定、衝突応答の頻度を上げる
sim.setTimeStep(timestep)
ショベルの移動を遅くする
薄い部分の形状を厚くする
粒子サイズを大きくする
ショベル付近の粒子をテレインにマージさせないようにマージ禁止区域を拡げる shovel.setNoMergeExtensionDistance()
# shovel: agxTerrain.Shovel
shovel.setNoMergeExtensionDistance(1.0)
禁止区域を距離mで指定する
agxViewer使用時は
gでマージ禁止区域を可視化できる距離を長くすると、生存する粒子数が増加し、計算コストが増加するので注意すること
ショベル底面下の粒子をテレインにマージさせる閾値を調整する shovel.setVerticalBladeSoilMergeDistance()
# shovel: agxTerrain.Shovel
shovel.setVerticalBladeSoilMergeDistance(0.0)
閾値を距離mで指定する
油圧ショベルで掘削するときは、距離を0に設定し、即座にテレインにマージさせる
ブルドーザで整地やならし作業をするときは、ある程度の距離を設定し、粒子を進行方向に運搬できるようにする
ショベル内の土の容積率を取得する terrain.getLastDeadLoadFraction(shovel)
deadLoadFraction = terrain.getLastDeadLoadFraction(shovel)
土の容積率(0 - 1)